Cao ốc A Nguyễn Kim, Phường 7, Quận 10, Tp Hồ Chí Minh
nguyenthaibinh04@gmail.com
Mạng xã hội:


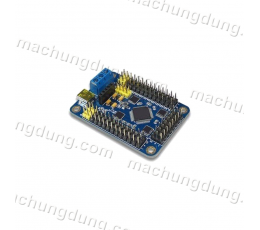
Mạch điều khiển 24 RC Servo (H20)
-
Mã SP:MD84
-
Giá:500,000VND
-
Lượt xem:2959
-
Số lượng:
-
-
-
Mô tả:Điện áp đầu vào: 6.5 ~ 12VDC
GIỚI THIỆU
Mạch điều khiển 24 Servo RC được thiết kế dựa trên vi điều khiển ARM 32 bit, tốc độ xử lý cao giúp quá trình điều khiển động cơ trở nên mịn hơn so với các loại vi điều khiển khác. Mạch được điều khiển giao tiếp trực tiếp với phần mềm trên máy tính, dễ dàng sử dụng chỉ với thao tác kéo, thả và lưu lại hành trình di chuyển của động cơ.
Trên board được thiết kế với một cổng USB mini để giao tiếp với máy tính, cổng giao tiếp UART có thể dùng với bluetooth để truyền từ xa hoặc dùng vi điều khiển truyền trực tiếp để điều khiển các servo. Một còi báo và các cổng cấp nguồn cho board cũng như cổng cấp nguồn cho servo.
THÔNG SỐ KỸ THUẬT
- Điện áp cung cấp cho board: 6.5 ~ 12V
- Điện áp cung cấp cho servo: 4.5 ~ 5.5V
- 24 kênh điều khiển servo
- Tín hiệu ngõ vào: cổng USB và socket giao tiếp TTL
- Tín hiệu ngõ ra từ vi điều khiển: PWM (độ chính xác 0.5us)
- Tốc độ baudrate: 115200, 128000, 9600, 19200, 38400, 57600.
- Kích thước: 51 x 43.5mm
- Giao diện điều khiển được thiết kế đơn giản dễ sử dụng
- Chỉ cần chọn cổng COM và nhấn vào nút "online" là có thể điều khiển các động cơ servo một cách dễ dàng bằng cách kéo và thả trên từng servo
- Giao diện được thiết kế phù hợp cho nhiều loại robot khác nhau như robot nhện, robot người, cánh tay robot,...
- Xuất nhập dữ liệu theo hành trình di chuyển của robot đã được lập trình sẵn trên phần mềm ra file .txt
- Có thể chạy mô phỏng hành trình làm việc của robot trực tiếp trên phần mềm theo một chu kì được thiết lập trước
- Tạo và lưu vào chip từng nhóm lệnh theo hành trình di chyển riêng của robot
- Cài đặt được tốc độ đi chuyển của servo
Phần mềm điều khiển
https://mega.nz/#!v0lmDaDZ!dCYzV7Lih9CnNSgzB_wecUuMp-KhHhgnJn8KGNQN8fk
Giao diện phần mềm

Sản phẩm liên quan
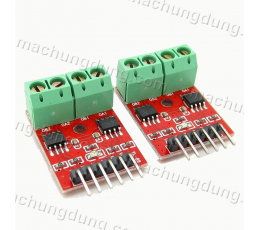

Stepper Motor Driver L9110 (H05)
Giá: 16.000đ
Còn lại: 20 cái
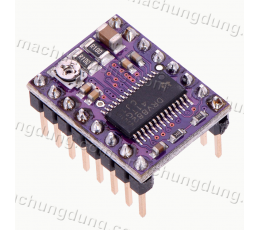
Stepper Motor Driver DVR8825 (H21)
Giá: 55.000đ
Còn lại: 20 cái

Stepper Driver TB6600 (H21)
Giá: 135.000đ
Còn lại: 10 cái

Stepper Driver TB6560 (H21)
Giá: 150.000đ
Còn lại: 50 cái
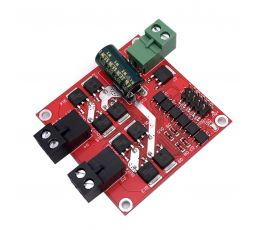
Module Điều Khiển Động Cơ Mạch 2 Cầu H 160W X2 (H05)
Giá: 220.000đ
Còn lại: 10 cái
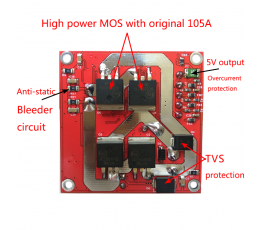
Module Điều Khiển Động Cơ Mạch 1 Cầu H 15A 9~36VDC (H05)
Giá: 250.000đ
Còn lại: 10 cái

Module cầu H BTS7960 43A IBT-2 (H05)
Giá: 90.000đ
Còn lại: 10 cái

MACH3 CNC Full
Giá: 750.000đ
Còn lại: 30 cái
MACH3 CNC Buffer 3 Relay (H21)
Giá: 250.000đ
Còn lại: 20 cái

Mạch điều khiển động cơ VNH2SP30 30A (H05)
Giá: 150.000đ
Còn lại: 10 cái
Mạch điều khiển 32 RC Servo (H20)
Giá: 750.000đ
Còn lại: 10 cái

Mạch đệm ULN2003 cho động cơ bước (H21)
Giá: 20.000đ
Còn lại: 10 cái




Gá cảm biến siêu âm (H40)
Giá: 20.000đ
Còn lại: 10 cái

Gá bắt động cơ vàng (H53)
Giá: 15.000đ
Còn lại: 10 cái

Gá bắt động cơ N20 (H20)
Giá: 5.000đ
Còn lại: 60 cái

Easy Driver A3967 (H21)
Giá: 50.000đ
Còn lại: 10 cái


Động cơ RC Servo MG996R (TowarPro) (H20)
Giá: 200.000đ
Còn lại: 10 cái

Động cơ RC Servo MG996 (H20)
Giá: 100.000đ
Còn lại: 10 cái

Động cơ RC Servo MG90S (H20)
Giá: 59.000đ
Còn lại: 20 cái

Động cơ RC Servo Futaba S3003 (H20)
Giá: 90.000đ
Còn lại: 20 cái

Động cơ DC giảm tốc GA12-N20 (H20)
Giá: 85.000đ
Còn lại: 20 cái

Động cơ bước 28BYJ-48 5V (H21)
Giá: 40.000đ
Còn lại: 21 cái

Động cơ bước 28BYJ-48 12V (H21)
Giá: 40.000đ
Còn lại: 20 cái

Động cơ bơm nước R385 (H39)
Giá: 60.000đ
Còn lại: 30 cái

BOB Mach3 CNC Buffer 1 Relay (H21)
Giá: 95.000đ
Còn lại: 20 cái

Bánh xe vàng 65mm (H30)
Giá: 20.000đ
Còn lại: 10 cái

Bánh xe N20 43mm (H30)
Giá: 25.000đ
Còn lại: 20 cái

Bánh xe đa hướng xoay để làm robot (H30)
Giá: 12.000đ
Còn lại: 10 cái
Adapter cho driver A4988 (H21)
Giá: 45.000đ
Còn lại: 40 cái




Mạch chuyển đổi PS2, PS3 sang UART (KHO)
Giá: 115.000đ
Còn lại: 10 cái

DVD motor hiệu SUOER / Motor đầu đĩa DVD
Giá: 15.000đ
Còn lại: 1000 cái

Động cơ RC Servo 9G 360 Độ
Giá: 40.000đ
Còn lại: 20 cái

Tay khiển từ xa không dây Wifi 2.4G PS2 (TREO)
Giá: 230.000đ
Còn lại: 5 cái

Tay khiển từ xa xe đồ chơi 27Mhz- YKH-4T8J-SS (TREO)
Giá: 110.000đ
Còn lại: 10 cái

Tay khiển từ xa xe đồ chơi 27Mhz- vô lăng (TREO)
Giá: 150.000đ
Còn lại: 10 cái


Động cơ 775 trục D 12VDC (H39)
Giá: 120.000đ
Còn lại: 10 cái

Động cơ 775 trục tròn 12VDC (H39)
Giá: 120.000đ
Còn lại: 10 cái
Module điều khiển động cơ bước 2 pha 4 pha 4 dây 5 pha (T29)
Giá: 130.000đ
Còn lại: 10 cái

Stepper Driver A4988 (H21)
Giá: 30.000đ
Còn lại: 41 cái

Arduino Shield Motor Control L293D (H05)
Giá: 45.000đ
Còn lại: 10 cái

Module Test Động Cơ RC Servo(H20)
Giá: 40.000đ
Còn lại: 10 cái
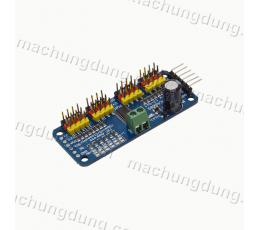
Mạch điều khiển 16 RC Servo 12-bit PCA9685 (H20)
Giá: 60.000đ
Còn lại: 20 cái
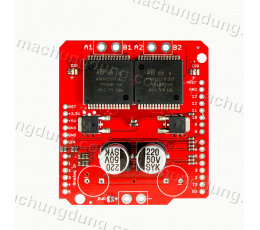
Monster Motor Shield (H05)
Giá: 300.000đ
Còn lại: 10 cái

Động cơ bước 28BYJ-48 + mạch đệm ULN2003 (H21)
Giá: 60.000đ
Còn lại: 10 cái


CNC 2030 DIY PVC MACH3 3 A
Giá: Liên hệđ
Còn lại: Hết hàng

Động cơ RC Servo 9G 90-180 Độ (H20)
Giá: 35.000đ
Còn lại: 20 cái


Gá bắt động cơ chữ L 25mm (H30)
Giá: 20.000đ
Còn lại: 10 cái

Động cơ rung (H12)
Giá: 25.000đ
Còn lại: 12 cái